
PyBullet is receiving regular updates, you can see the latest version here: https://pypi.org/project/pybullet
Installation and update is simple:
pip install -U pybullet
Check out the PyBullet Quickstart Guide and clone the github repository for more PyBullet examples and OpenAI Gym environments.
A while ago, Our RSS 2018 paper “Sim-to-Real: Learning Agile Locomotion For Quadruped Robots” is accepted! (with Jie Tan, Tingnan Zhang, Erwin Coumans, Atil Iscen, Yunfei Bai, Danijar Hafner, Steven Bohez, Vincent Vanhoucke).
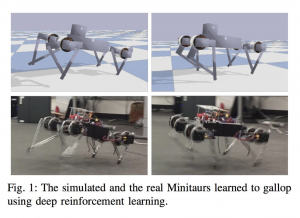
See also the video and paper on Arxiv.