
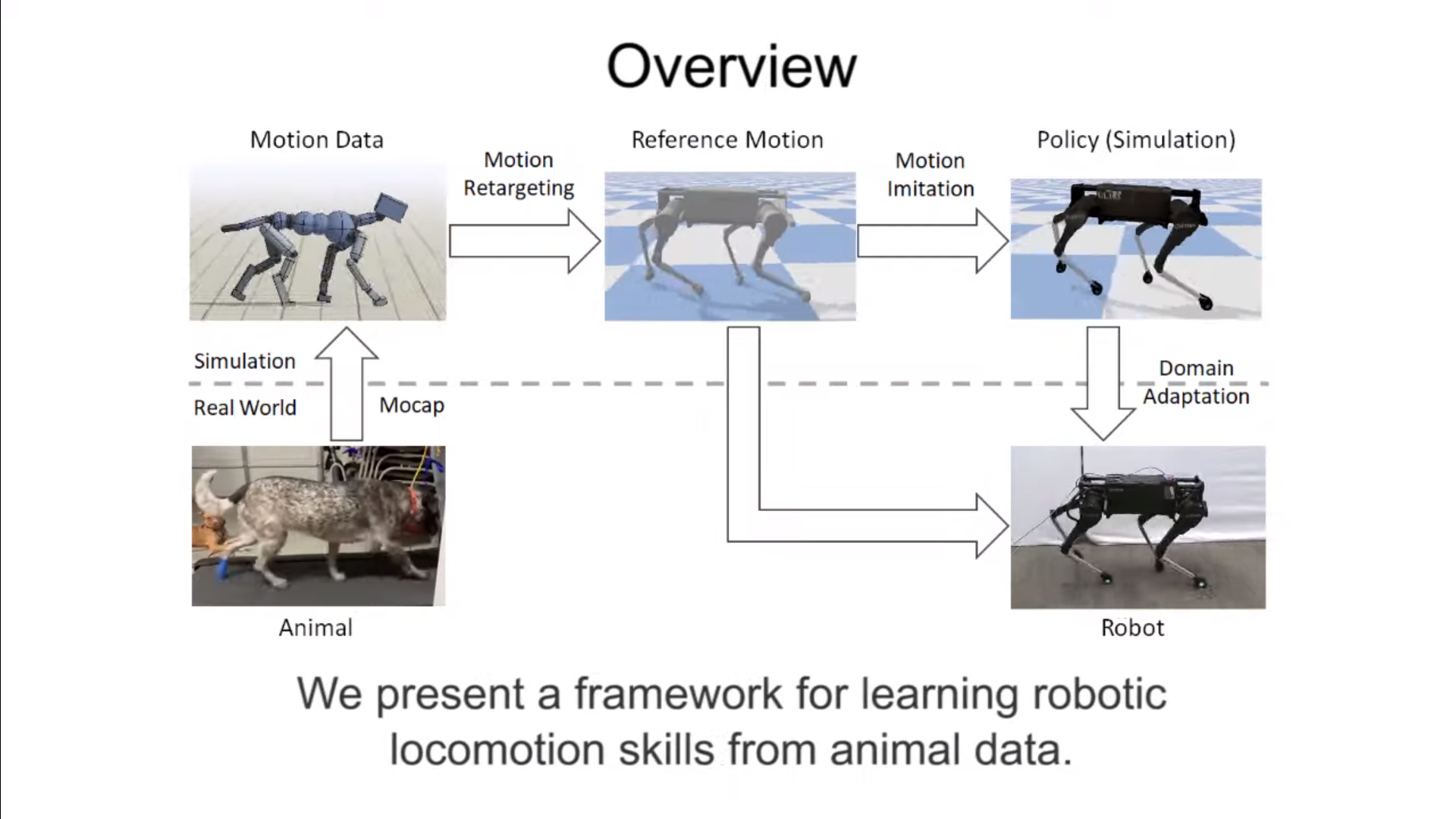
Our research on imitating animals won the best paper award of RSS 2020! Thanks to Jason Peng and collaborators. See the project website.
See the related repository with model-predictive-control (MPC) quadruped locomotion and the motion imitation research at https://github.com/google-research/motion_imitation
Also tagged a github release of Bullet Physics and PyBullet, both version 3.05. The release was used for our motion imitation research, and also includes various improvements for the finite-element-method (FEM) deformable simulation, by Xuchen Han and Chuyuan Fu .