I create a btPairCachingGhostObject object as sensor and a btRigidBody object.
Then, I control the rigid body to move along X-axis (move 0.005m each time) until colliding with sensor.
A illogical issue has been found:
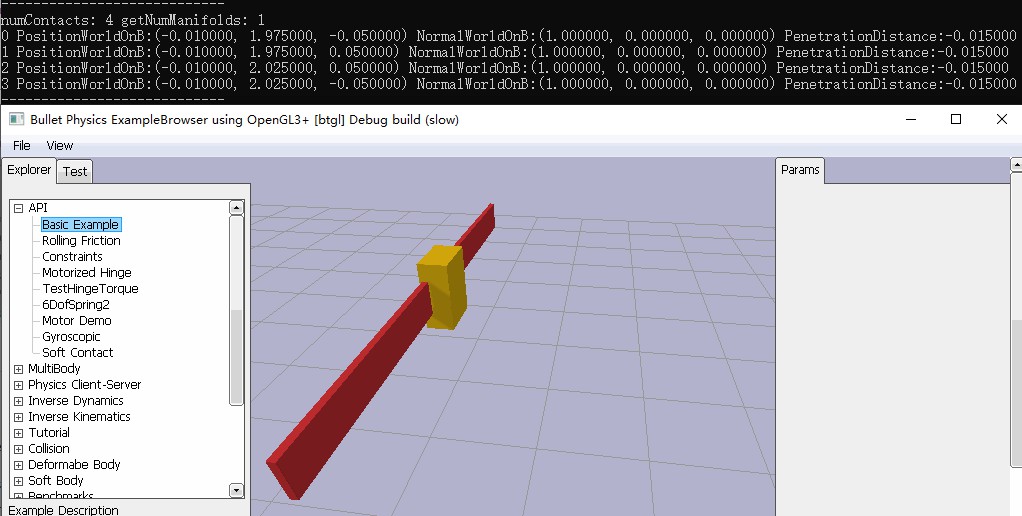
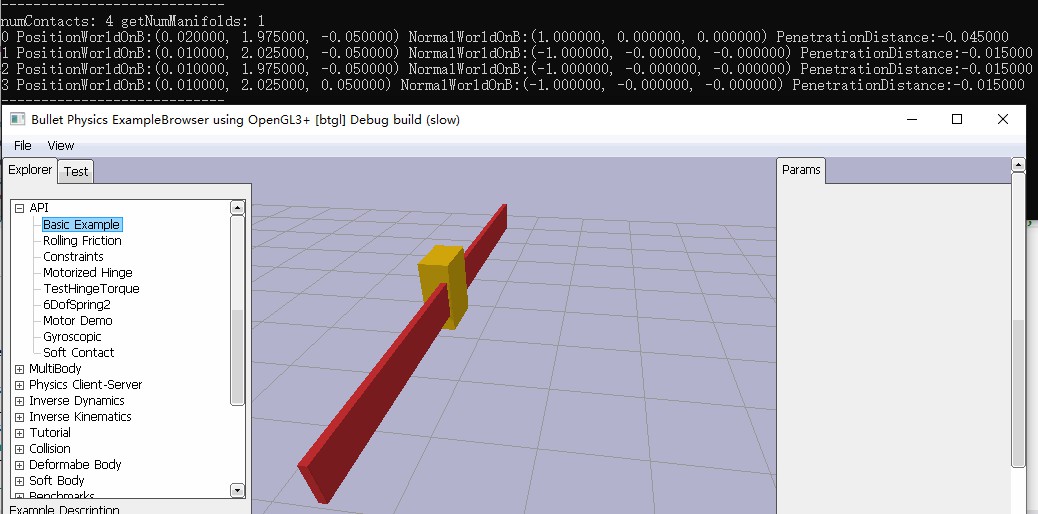
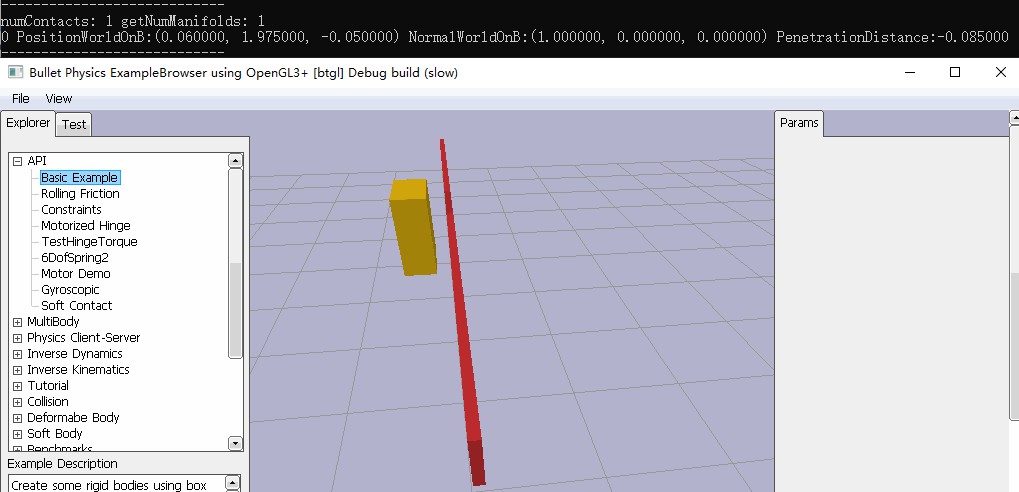
When the rigid body passes through the sensor from left to right, the contact points have been not removed cleanly!
The following are the moving process of rigid body:
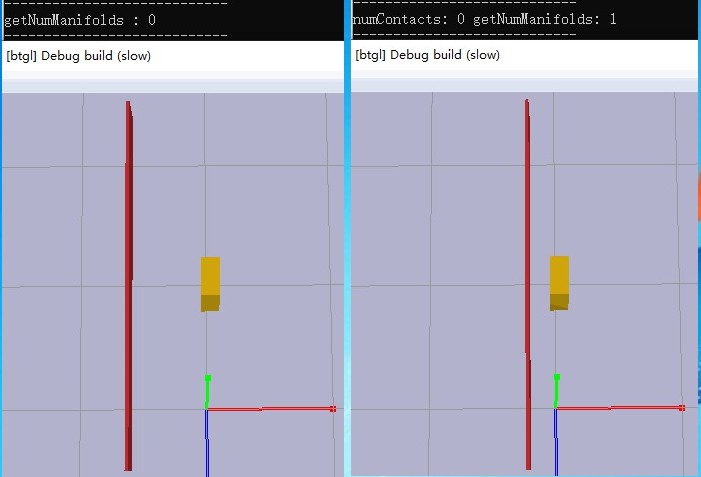
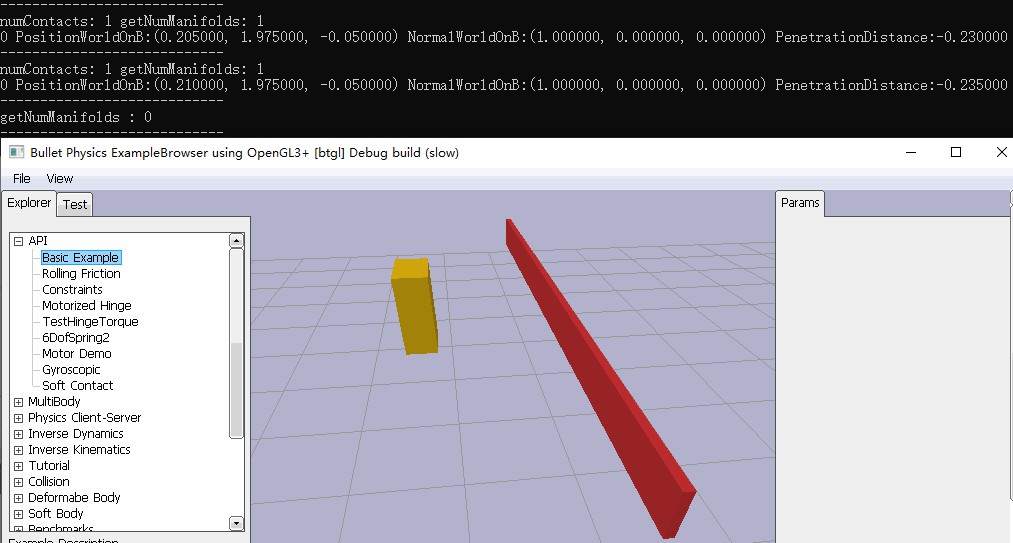
By the way, rigid body enters the sensor from the left side and collides with it.Rigid body doesn't go over the sensor center and then move out from the left.
This situation is logical that all of the contact points have been removed cleanly!
The following is the record of this situation:
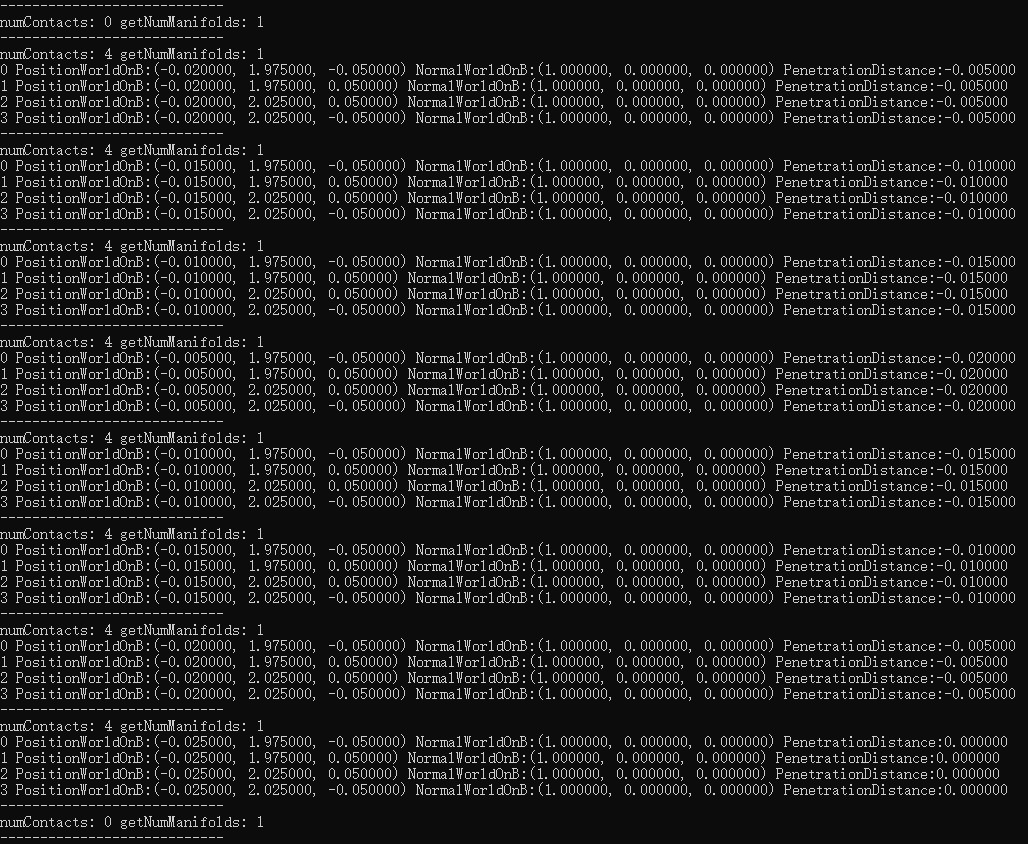
Is it something wrong with Bullet collision detection algorithm?
I think this issue is casued by btBoxBoxCollisionAlgorithm doesn't compute correct contact point loction and normal vector.
Thanks help.
Here is my test code