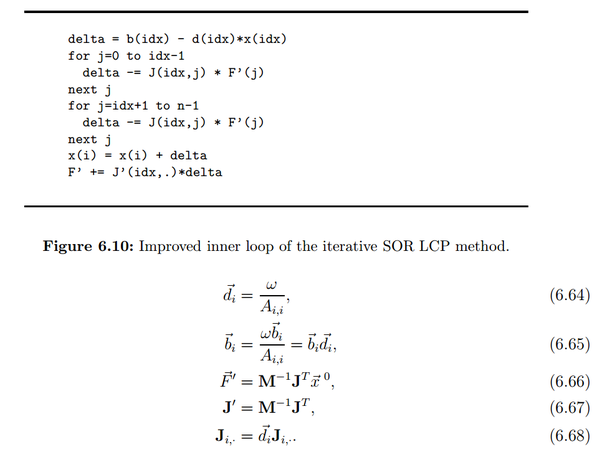
When I see the src code in Bullet, I think the Result of the Equation is the Constraint Force Fc*deltaT = dP (delta Impulse).
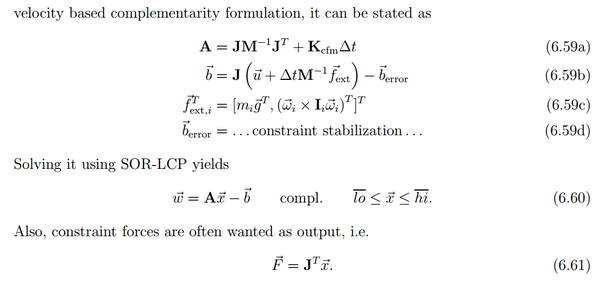
But I can't understand the param 'Kcfm' in the formulation above,constraint force mixing,it's a diagonal matrix in vector form
Which paper is about 'Kcfm'?
Code: Select all
void tbSequentialImpulseConstraintSolver::ResolveSingleConstraintRowLowerLimit(tbSolverBody& body1, tbSolverBody& body2, const tbSolverConstraint& c)
{
tbScalar deltaImpulse = c.m_rhs - tbScalar(c.m_appliedImpulse)*c.m_cfm;
const tbScalar deltaVel1Dotn = c.m_contactNormal.Dot(body1.m_deltaLinearVelocity) + c.m_relpos1CrossNormal.Dot(body1.m_deltaAngularVelocity);
const tbScalar deltaVel2Dotn = -c.m_contactNormal.Dot(body2.m_deltaLinearVelocity) + c.m_relpos2CrossNormal.Dot(body2.m_deltaAngularVelocity);
deltaImpulse -= deltaVel1Dotn*c.m_jacDiagABInv;
deltaImpulse -= deltaVel2Dotn*c.m_jacDiagABInv;
const tbScalar sum = tbScalar(c.m_appliedImpulse) + deltaImpulse;
if (sum < c.m_lowerLimit)
{
deltaImpulse = c.m_lowerLimit - c.m_appliedImpulse;
c.m_appliedImpulse = c.m_lowerLimit;
}
else
{
c.m_appliedImpulse = sum;
}
if (body1.m_invMass > tbScalar(0.))
body1.ApplyImpulse(c.m_contactNormal*body1.m_invMass, c.m_angularComponentA, deltaImpulse);
if (body2.m_invMass > tbScalar(0.))
body2.ApplyImpulse(-c.m_contactNormal*body2.m_invMass, c.m_angularComponentB, deltaImpulse);
}Code: Select all
tbScalar restitution = 0.f;
tbScalar positionalError = solverConstraint.m_rhs;//already filled in by getConstraintInfo2
tbScalar velocityError = restitution - rel_vel;// * damping;
tbScalar penetrationImpulse = positionalError*solverConstraint.m_jacDiagABInv;
tbScalar velocityImpulse = velocityError *solverConstraint.m_jacDiagABInv;
solverConstraint.m_rhs = penetrationImpulse + velocityImpulse;
solverConstraint.m_appliedImpulse = 0.f;so what's the meaning of 'restitution' and which paper is about it.