What is the meaning of parameter Kcfm in PGS Formulation?
Posted: Wed May 17, 2017 3:11 am
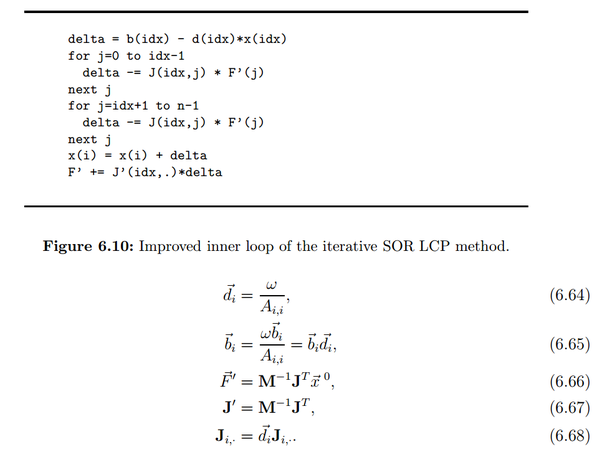
I read K.Erlenben book <<Stable,Robust And Verstile>> Chapter 6 to learn the PGS in Bullet

When I see the src code in Bullet, I think the Result of the Equation is the Constraint Force Fc*deltaT = dP (delta Impulse).
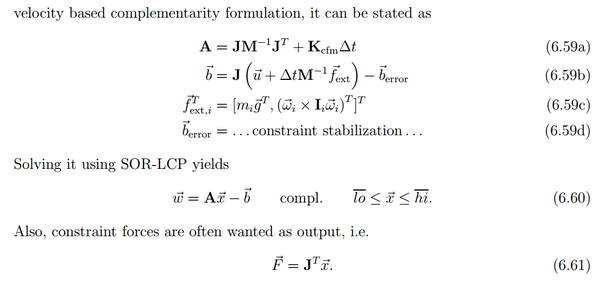
But I can't understand the param 'Kcfm' in the formulation above,constraint force mixing,it's a diagonal matrix in vector form
Which paper is about 'Kcfm'?
In the Formulation above,I'm clear about the posErr and velocityErr,But Berror doesn't have the param 'restitution',
so what's the meaning of 'restitution' and which paper is about it.
When I see the src code in Bullet, I think the Result of the Equation is the Constraint Force Fc*deltaT = dP (delta Impulse).
But I can't understand the param 'Kcfm' in the formulation above,constraint force mixing,it's a diagonal matrix in vector form
Which paper is about 'Kcfm'?
Code: Select all
void tbSequentialImpulseConstraintSolver::ResolveSingleConstraintRowLowerLimit(tbSolverBody& body1, tbSolverBody& body2, const tbSolverConstraint& c)
{
tbScalar deltaImpulse = c.m_rhs - tbScalar(c.m_appliedImpulse)*c.m_cfm;
const tbScalar deltaVel1Dotn = c.m_contactNormal.Dot(body1.m_deltaLinearVelocity) + c.m_relpos1CrossNormal.Dot(body1.m_deltaAngularVelocity);
const tbScalar deltaVel2Dotn = -c.m_contactNormal.Dot(body2.m_deltaLinearVelocity) + c.m_relpos2CrossNormal.Dot(body2.m_deltaAngularVelocity);
deltaImpulse -= deltaVel1Dotn*c.m_jacDiagABInv;
deltaImpulse -= deltaVel2Dotn*c.m_jacDiagABInv;
const tbScalar sum = tbScalar(c.m_appliedImpulse) + deltaImpulse;
if (sum < c.m_lowerLimit)
{
deltaImpulse = c.m_lowerLimit - c.m_appliedImpulse;
c.m_appliedImpulse = c.m_lowerLimit;
}
else
{
c.m_appliedImpulse = sum;
}
if (body1.m_invMass > tbScalar(0.))
body1.ApplyImpulse(c.m_contactNormal*body1.m_invMass, c.m_angularComponentA, deltaImpulse);
if (body2.m_invMass > tbScalar(0.))
body2.ApplyImpulse(-c.m_contactNormal*body2.m_invMass, c.m_angularComponentB, deltaImpulse);
}Code: Select all
tbScalar restitution = 0.f;
tbScalar positionalError = solverConstraint.m_rhs;//already filled in by getConstraintInfo2
tbScalar velocityError = restitution - rel_vel;// * damping;
tbScalar penetrationImpulse = positionalError*solverConstraint.m_jacDiagABInv;
tbScalar velocityImpulse = velocityError *solverConstraint.m_jacDiagABInv;
solverConstraint.m_rhs = penetrationImpulse + velocityImpulse;
solverConstraint.m_appliedImpulse = 0.f;so what's the meaning of 'restitution' and which paper is about it.