Perhaps this post should be in the 'Career Opportunities' section but I'm only looking to find a solution to one particular problem, anyway ...
I'm a Bullet-user in Blender, and I would like to simulate a collision between two 0val particles that are 100% elastic (Coefficient of Restitution = 1), perfectly smooth and round (Friction = 0), and deflect each other when they meet.
Here's an animation I made of 3 deflections that I'm hoping this setup would generate:
http://youtu.be/l8AR0SOXzHY (39 sec.)

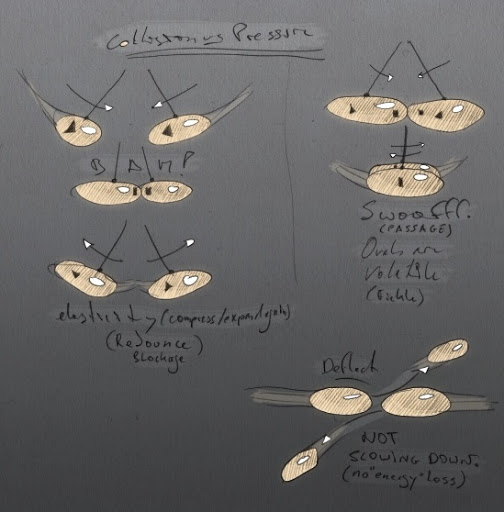
When these particles meet, they deviate to follow the path of least resistance; so they: Hit - Push each other -Tilt each other over (slide) - Balance each other out again - and continue to move straight forward again, along their central axis, here's a rough sketch:
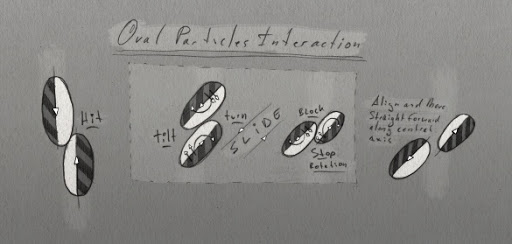
Simply put, they softly deflect (of) each other, and don't bounce or lose any energy because internally they don't absorb energy, there's also no friction between them, they are 100% slippery.
What they give and lose of kinetic energy to each other during a collision, is what they get back it in equal amounts ... So, they just keep on going forward at their given velocity.
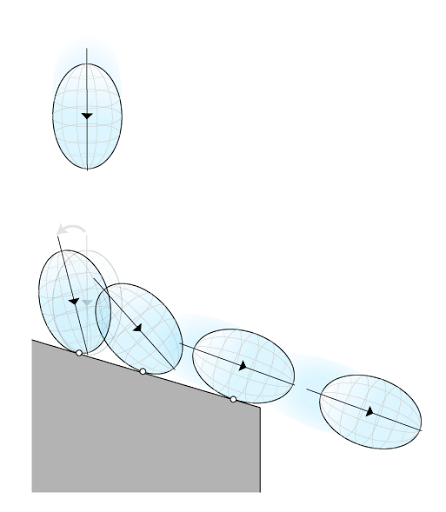
The YouTube animation above was with 3D 0val bodies, but for testing the concept a 2D simulation is good enough. Below are some clearer drawings, where it would be similar to an 0val falling on a slope and sliding forward.
I'm curious if anyone could help me with tackling this idea,
kind regards,
m.
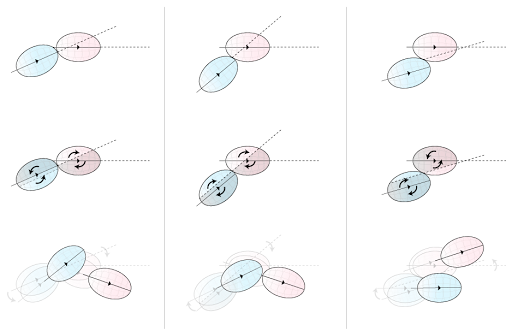
... and 3 different collisions:
--
These Bullets would be a cross-over between 'normal' soapbubbles, that stick and slide along each-other:

... and Billiard balls:

... what I'm wondering about is what's in the middle: fast, hard and super slippery.