I'm new to Bullet, I'm trying to move a box in kinematics.
As far as I know, when in kinematics, I should move the box by the following method:
Code: Select all
btRigidBody->getMotionState()->setWorldTransform(const btTransform& worldTrans);Code: Select all
btRigidBody->setLinearVelocity(const btVector3& lin_vel);I want to know which method is used for calculating velocity according to the offset of world transform? and where is this method called?
Thank you!
The following is my test code.
Code: Select all
#include "RollingFrictionDemo.h"
///btBulletDynamicsCommon.h is the main Bullet include file, contains most common include files.
#include "btBulletDynamicsCommon.h"
#include <stdio.h> //printf debugging
#include "../CommonInterfaces/CommonRigidBodyBase.h"
#include "../Utils/b3ResourcePath.h"
///The RollingFrictionDemo shows the use of rolling friction.
///Spheres will come to a rest on a sloped plane using a constraint. Damping cannot achieve the same.
///Generally it is best to leave the rolling friction coefficient zero (or close to zero).
class RollingFrictionDemo : public CommonRigidBodyBase
{
public:
RollingFrictionDemo(struct GUIHelperInterface* helper)
: CommonRigidBodyBase(helper)
{
}
virtual ~RollingFrictionDemo()
{
}
void initPhysics();
virtual bool keyboardCallback(int key, int state);
virtual void stepSimulation(float deltaTime);
void resetCamera()
{
float dist = 7.66;
float pitch = -41.2;
float yaw = 150;
float targetPos[3] = {1, 1, 1};
m_guiHelper->resetCamera(dist, yaw, pitch, targetPos[0], targetPos[1], targetPos[2]);
}
};
btRigidBody* kBox;
void RollingFrictionDemo::initPhysics()
{
m_guiHelper->setUpAxis(1);
createEmptyDynamicsWorld();
m_guiHelper->createPhysicsDebugDrawer(m_dynamicsWorld);
if (m_dynamicsWorld->getDebugDrawer())
m_dynamicsWorld->getDebugDrawer()->setDebugMode(btIDebugDraw::DBG_DrawWireframe + btIDebugDraw::DBG_DrawContactPoints);
btVector4 color = btVector4(0, 0, 1, 1);
btBoxShape* groundShape = createBoxShape(btVector3(btScalar(50.), btScalar(2.), btScalar(50.)));
groundShape->setMargin(btScalar(0.004f));
btTransform startTransform;
startTransform.setIdentity();
startTransform.setOrigin(btVector3(0, -2, 0));
btRigidBody* floor = createRigidBody(btScalar(0), startTransform, groundShape, color);
btScalar mass(1.f);
btCollisionShape* shape = createBoxShape(btVector3(.2, .2, .2));
startTransform.setIdentity();
startTransform.setOrigin(btVector3(0, 0.2, 0));
kBox = createRigidBody(mass, startTransform, shape, color);
kBox->setCollisionFlags(kBox->getCollisionFlags() | btCollisionObject::CF_KINEMATIC_OBJECT);
kBox->setActivationState(DISABLE_DEACTIVATION);
for (int i = 0; i < 5; i++)
{
btTransform startTransform2;
startTransform2.setIdentity();
startTransform2.setOrigin(btVector3((i + 1) * 1, 0, 0));
shape = createBoxShape(btVector3(.2, .2, .2));
createRigidBody(10, startTransform2, shape, color);
}
m_guiHelper->autogenerateGraphicsObjects(m_dynamicsWorld);
}
bool run123 = false;
bool printEnabled = true;
bool RollingFrictionDemo::keyboardCallback(int key, int state)
{
bool handle = false;
if (state)
{
switch (key)
{
case B3G_F6:
{
handle = true;
run123 = !run123;
break;
}
case B3G_F7:
{
printEnabled = !printEnabled;
break;
}
}
}
return handle;
}
void RollingFrictionDemo::stepSimulation(float deltaTime)
{
CommonRigidBodyBase::stepSimulation(deltaTime);
if (run123)
{
//btVector3 v = btVector3(2, 0, 0);
//kBox->setLinearVelocity(v);
btMotionState* state = kBox->getMotionState();
btTransform s;
state->getWorldTransform(s);
s.setOrigin(s.getOrigin() + btVector3(deltaTime, 0, 0));
state->setWorldTransform(s);
//kBox->setCenterOfMassTransform(s);
//kBox->proceedToTransform(s);
//kBox->saveKinematicState(deltaTime);
}
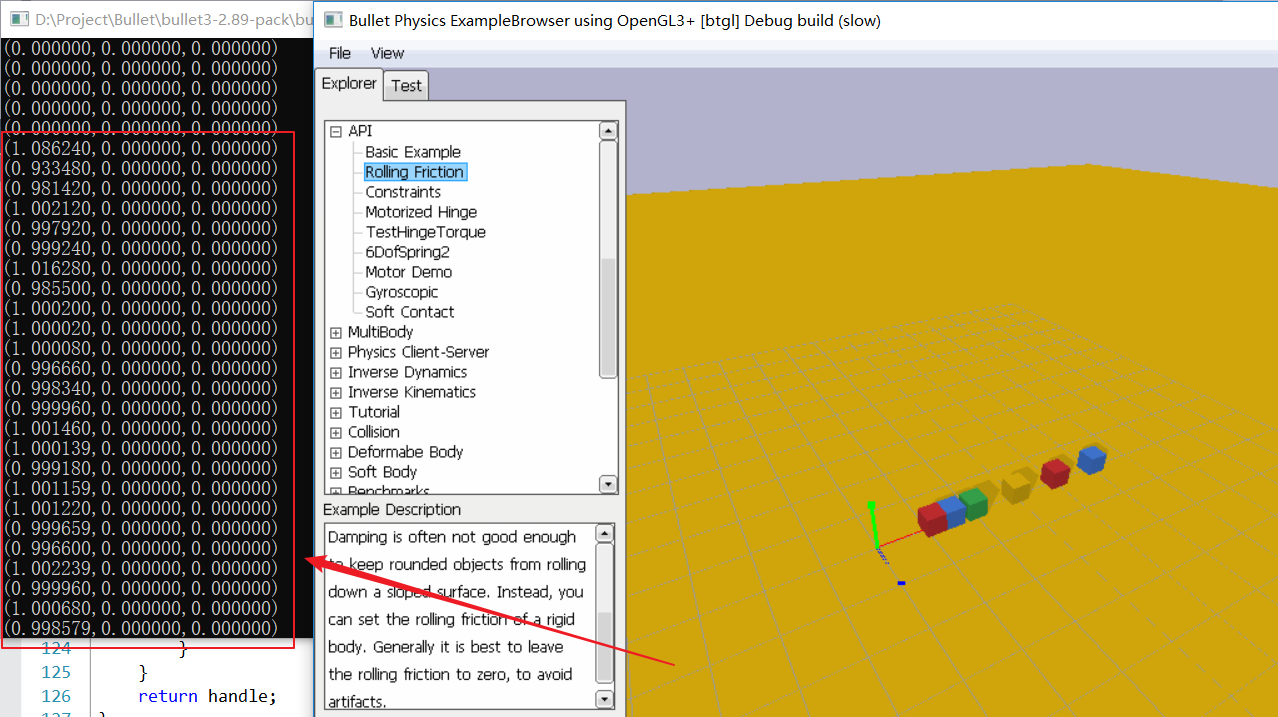
if (printEnabled)
printf("(%f,%f,%f)\n", float(kBox->getLinearVelocity().getX()),
float(kBox->getLinearVelocity().getY()),
float(kBox->getLinearVelocity().getZ()));
}
class CommonExampleInterface* RollingFrictionCreateFunc(struct CommonExampleOptions& options)
{
return new RollingFrictionDemo(options.m_guiHelper);
}
Thanks again!
